

电池片定位
目的:电池片定位及校正
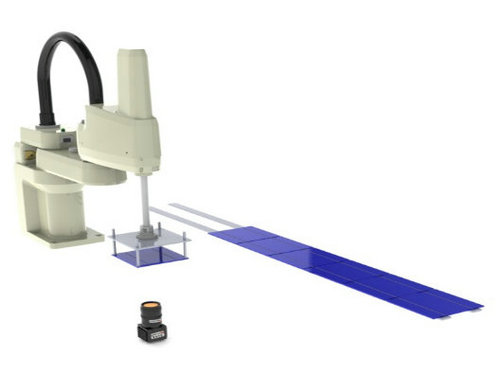
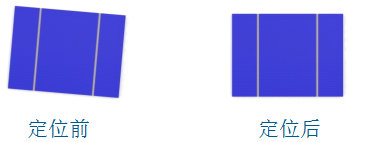
方法:在电池片进行串焊时,成串的电池片要完全对齐才能保证焊接的电池组性能达到要求。所以,在机器人抓取并放置电池片的过程中需要对电池片进行定位来校正最终放置的位置,我们采取机器视觉的方法计算出需要平移及旋转的角度,将这些信息传递给机器人,机器人再对电池片进行校正。
性能:检测速度:3片/s;检测精度:0.01mm
适用领域:适用于太阳能行业的硅片丝印以及电池片串焊定位。
系统配置:
相机:KW -VD500SM
(2592×1944、1/2.5″、USB黑白CCD)
镜头:KW -2514MP
光源:组合LED光源
PC:KW -VS820嵌入式处理器
软件:KW -ICS机器视觉图像处理软件
检测结果:
- 上一篇:没有了
- 下一篇:没有了